谐波减速器一般用于轻型机器人或机器人腕部关节。
由波发生器、柔轮和钢轮组成,具有减速比大、齿隙小、精度高,零部件少、安装方便及体积小、重量轻等优点。目前,国际上谐波减速器市场几乎被日本Harmonic公司垄断,因此该公司具有定价权。
国内谐波减速器研究起步较早,如北京谐波传动技术研究所早在上世纪六、七十年代便开始了谐波减速器的研究。由于市场问题,该项研究进展较慢,但积累了较多的研发经验。近年来,国产谐波减速器开始迅速发展,国产谐波减速器开始在国产机器人产品上得到越来越多的应用。

RV减速器一般用于机器人的肩关节,用于传递较大的扭矩。
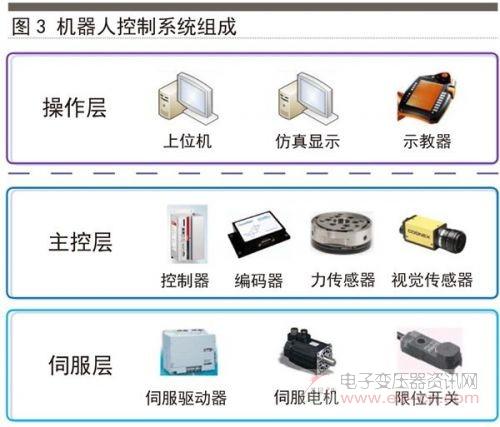
目前,该领域的国际市场也被日本的Nabtesco公司所垄断。国内在RV减速器制造的一些关键技术上还有待提高,比如,针孔壳要求确保数十个半圆孔的圆度及同心度。工业机器人的控制系统一般包括伺服层、主控层及操作层,其中伺服层包括伺服电机、驱动器等,主控层包括控制器、编码器、力传感器等。目前,国内机器人在伺服层和主控层的核心技术上均存在一定程度的制约。
控制系统方面,欧系机器人一般采用伦茨、博世力士乐等控制系统。
其具有过载能力强、动态响应好、驱动器开放性强等优点;但价格昂贵,日系机器人一般采用安川、松下、三菱等品牌的控制系统,相对欧系控制系统来说动态性能偏弱,但具有价格优势。近年,一些国产控制系统中也逐渐开始在工业机器人产品上得到应用。
总体来说,机器人理论及关键技术研究是我国工程领域长期面临的科学挑战,需要解决机器人与作业任务和环境的适应性、人机交互与自律协同控制、信息采集与传输机制等科学问题,突破减速器、感知驱动与控制等关键技术及核心部件等技术瓶颈,确保我国在下一轮机器人发展大潮中处于不败之地,机器人理论与关键技术研究是国家的重大战略需求。
智能机器人技术将走向何方?
机器人技术涉及众多领域,具有多学科交叉和融合等特点。
机器人正在逐步发展成为具有感知、认知和自主行动能力的智能化装备,是数学、力学、机构学、材料科学、自动控制、计算机、人工智能、光电、通讯、传感、仿生学等多学科和技术综合的成果,其发展水平体现了国家高技术领域的综合实力。我国现阶段机器人的发展需要智能和自主作业能力的提升、人机交互能力的改善、安全性能的提高,解决制约“人-机交互”、“人-机合作”、“人-机融合”的瓶颈,突破三维环境感知、规划和导航、类人的灵巧操作、直观的人机交互、行为安全等关键技术。
智能机器人技术发展的三个目标:
第一,加强工业机器人整机设计理论与方法研究,寻求新思维,突破驱动、传动、感知与控制等核心基础部件的技术瓶颈,提升机器人操作的灵活性、在线的感知能力;
第二,加强服务机器人的研究,提升机器人理解人的行为和抽象指令、人机沟通与协调合作能力,建立机器人安全机制;
第三,针对在核辐射、军事战场、自然和人为灾害等危险甚至不可达区域执行任务的需要,开展特种机器人的研究,解决在线实时人机交互、动态未知环境中自主作业等问题,实现机器人与人共处同一环境空间互助作业,为开发国家亟需的现代机器人提供科学理论和关键性技术支撑。
为了实现上述发展目标,我国智能机器人技术发展需要针对现代机器人出现的“人-机交互”、“人-机合作”、“人-机融合”等发展趋势,解决三个主要科学问题。
第一,揭示机器人与非结构化环境、不确定性作业任务的适应性规律,为现代机器人创新与设计提供理论基础;
第二,揭示机器人理解人的行为和抽象指令的机理,为智能机器人构建人机沟通及安全机制提供理论依据;
第三,揭示人机交互与自律协同控制原理,为机器人人机协调合作提供技术支撑。
此外,一些有较强应用前景的新型特种机器人设计技术也值得关注,如:
海底管道安装、检修与维护机器人;海底石油管道泄漏抢险机器人;海底打捞与作业机器人;地震搜救与作业机器人;井喷救灾机器人;核电维护和退役与救灾机器人;消防救援机器人;外星探测与作业机器人;山地运载机器人;自主步行作战机器人;移动式制造机器人系统;多指多臂多智能体制造机器人系统;康复、健身、医疗、家庭护理机器人;别墅区安保机器人;人机合作建筑作业机器人等。