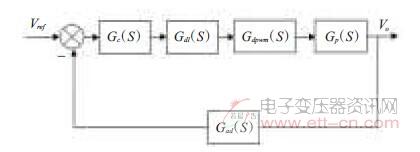
图2 数字电源在S域的闭环结构图
功率级电路完成输入至输出大电流信号的隔离变换,其传递函数时可以看作PWM占空比d 到输出电压Vo之间的转换关系。如果考虑到输出滤波电容的串联等效阻抗Re,得到的传递函数如下:
Gp(s) =(Recs + 1)/(LC((Re + RL)/RL)S2 +(L/RL+ Rec)s + 1) (1)
数字电源控制回路里的延迟效应是由数字芯片的工作特性所决定的,主要由AD转换器和DPWM发生器产生。ADC接收模拟信号后,由主程序控制进行AD转换,转换完成后调用中断处理程序输出数字信号,其延迟时间Tad包括AD转换时间和处理器中断延迟时间;DPWM发生器在输入数字占空比信号到输出模拟PWM驱动信号之间的转换也存在一定的延迟时间Tdpwm。将控制回路里主要的延迟效应用一个延迟环节来描述,等效延迟时间为Td=Tad+Tdpwm,则传递函数为:
Gdl(s) = e-sTd (2)
延迟时间Td与采样周期Ts存在着一定的比例关系,延迟环节的引入在设计模拟补偿器时可以分析采样速率对系统的影响。为了方便构建闭环系统的s 域传递函数模型并应用Matlab 程序计算分析,对延迟环节的传递函数进行Pade 近似处理,得到的延迟环节函数(3)可以直接插入到数字电源的原始模型中,针对采样延迟时间Td来调整补偿器以获得良好的响应。
Gdl(s) =(1-sTd/2)/(1+sTd/2) (3)
电源的输出电压和输入电流信号由于幅度匹配的需要,必须经过信号调理电路处理后才能被AD转换器接收。ADC的采样延迟时间已经在延迟环节里考虑,而信号调理电路和AD转换器的电压增益分别为Kv和Kad,则传递函数可以简化为:
Gad(s) = KvKad (4)
DPWM发生器接收到补偿器输出的数字占空比信号后,应用片上定时器模块输出PWM方波驱动主开关管的导通和关断,其在控制回路中的作用类似于一个D/A 转换器。DPWM的分辨率必须高于AD转换器的分辨率,即DPWM的位数npwm必须大于AD转换器的位数。否则DPWM的最低有效位(LSB)调节的输出电压幅度大于AD转换器的LSB 对应的电压分辨率,而导致设定的输出电压处于振荡状态,即所谓的“极限环”状态。因为延迟时间已经归一到延迟环节里,传递函数可以简化为:
Gdpwm(s) =Kdpwm=1/(2ndpwm–1) (5)
3、数字补偿器设计
通过上述分析,获得了图1 所示数字电源在s 域的传递函数模型,下面基于系统要求的稳态和动态性能来设计数字补偿器。采用的系统参数如下:输入电压Vin=36~72 V,输出电压Vout=5 V,输出电流Iout=6 A,PWM频率fpwm=300 kHz,L=8 μH,C=200 μF;要求动态恢复时间ts<200 μs,相位裕度PM=45 ℃ 。
应用了Matlab 程序的“Sisotool”工具箱进行系统s 域模拟补偿器的计算机辅助设计。“Sisotool”模块是Matlab 控制系统工具箱提供的一个强大的单输入单输出线性系统设计器,为用户提供了很友好的图形界面。应用“Sisotool”工具可以很方便地进行系统的频域分析和补偿设计,在根轨迹法和伯德图法的基础上通过修改线性系统的零点、极点以及增益等进行模拟补偿器的设计,以获得所需要的稳态和动态性能。
为了减小传统数字重设计法的误差,在建模闭环系统时引入了等效延迟环节,补偿器的设计结果和采样速率密切相关。采样速率的确定取决于DSP 芯片TMS320C2000 设置的数字采样方案。在定时器输出的PWM脉冲中间时刻设置了AD转换触发,转换完成后设置新的PWM占空比数值,在下一个PWM周期开始时生效。因此,采样周期Ts和PWM开关周期相等,计算得到的延迟时间Td=Ts/2。
将Td=1.665 μs,Re=0.64 Ω,RL=0.83 Ω等系统参数代入公式(1)和(3)中,并将DPWM发生器和AD采样的比例系数归一化,得开环传递函数:
GOL(s) = Gdl(s)×Gdpwm(s)×Gp(s)×Gad(s) =((1.28×10-4s + 1)/(2.83×10-9s2 + 1.376×10-4s + 1))·((1 - 0.833×10-6s)/(1 + 0.833×10-6s)) (6)
在MATLAB中建立系统开环模型GOL(s)后,将该模型导入到“sisotool”设计工具箱,得到未添加补偿器的开环系统伯德图和根轨迹图,见图3。