程序在运行的过程当中, 每隔1 秒定时器1 产生一次中断, 通过串口接收监控平台发来的指令信息并将飞机的两组电源的实时电压状况、继电器的状态等信息通过无线射频模块发送给地面站以便地面能实时了解到飞机的供电情况。
2. 3 上位机设计
2. 3.1 无线射频模块
电源管理系统的上位机硬件方面主要由无线射频模块、电平转换电路及PC 电脑组成, 大致框图如图1 所示。因射频模块将接收出来的数据是TTL 电平, 再通过max 232 电平转换将其变为RS232 电平传送给电脑, 从而实现飞机和地面的通信。
该系统之所以能实现远距离监测飞机, 主要依靠无线射频模块的远距离和高准确度等特性。其主要特点如下所示: ( 1)长距离特性: 室内/ 城市距离高达450 米; 室外可视范围: 带2.1dB 偶极天线高达11 公里, 带高增益天线可达32 公里; 接收器灵敏度为- 110dBm.( 2) 高级网络和安全: 7 个跳频信道, 每个信道可获得65k 地址, 恢复和确认机制以保证可靠分组传输; 支持对等网络结构( 没有主/ 从依赖关系) , 支持点对点、点对多和多点接入网络拓扑结构。
由此可知, XT end OEM 无线射频模块在低成本无线数据通讯解决方案中提供了最远的距离。该模块易于使用, 耗电低, 对设备间重要数据包提供了可靠的数据传送, 体积紧凑节省宝贵的电路板空间。图7 表示的是由XTend OEM 无线射频模块构成的主机间无线连接的系统框图。

图7 主机间无线连接的系统框图
2.3.2 地面监控平台
监控平台是整个设备监控系统的重要组成部分, 监控平台与控制程序之间要求具有双工通信的。一方面, 飞机平台上控制器将飞机的实时信息利用数传发到地面, 另一方面, 地面站将指令发给飞机以完成所需要的任务。
地面软件基于Microso ft 的VC+ + 6. 0 平台借助其提供的MFC 类库进行开发。具体的软件开发过程, 采用面向对象的设计方法, 使用C+ + 语言实现。每种功能模块, 对应一个类。这样, 使得最终的软件实现结构上清晰合理, 易于维护升级。该程序利用MFC 技术结合M SComm 控件, 使用C+ + 编写。程序功能包括: 手动设置串口参数, 串行接收数据和发送指令, 显示接收数据信息和保存接收数据等功能。
3 实验结果分析
控制器在得到电源电压、继电器状态、充放电情况等信息后, 将这些信息传给地面并保存到PC 机上面。图8 所示就是飞机在飞行时采集到的数据。
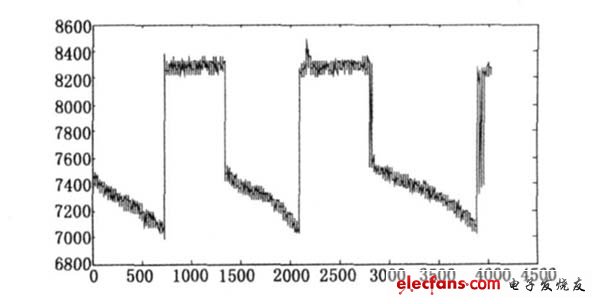
图8 电池1 充放电数据。
从图中可知, 首先电池1 作为负载给系统供电, 经过一段时间使用后由7.5V 降到7.0V, 此时单片机在检测到该电池电量不足后驱动继电器, 并将该电池切换到充电回路。经过10 分钟充电后, 因电池2 的电压也小于7V 单片机再次将系统的电源切换到电池1, 如此反复直至完成任务。由此可知该系统能将动能转换为动能并有效的管理系统的用电循环, 提高了系统的运行时间, 从而提高整个系统的实用性和可靠性。
4 结束语
本文设计了一套UAV 电源管理系统, 该系统具有自动控制充放电管理, 实时监测电池电压等功能。该系统已经经过调试和试验验证了其可行性, 但是为了保证飞机安全, 还要做更多的试验以保证无人机自主飞行的安全和稳定。除此之外, 高低频滤波, 电池电量预测等也是重要的方向, 需要深入的研究。现今, 锂电池的使用范围越来越广, 其价格也相对适中,如果掌握先进的科学的使用方法, 让锂电池发挥应有的最大效用, 将会节省大量的资源和财富。