自动驾驶定位的特点
对于定位系统和传统定位来说,自动驾驶车辆的位置和姿态有以下特点:
◆ 厘米级别的精度,需要精确到车在车道线的具体位置,例如距离左右边线几公分。
◆ 高频低延迟,需要毫秒级别的时间延迟,实时传输车的位置,否则会出现安全事故。
几种定位方式
全球导航卫星系统
特点:
米级别精度
低频
干扰或者遮挡
解决方法:RTK(Real - time kinematic,实时动态)载波相位差分技术,可以达到厘米级别。
相对定位:惯性测量单元IMU
特点:
加速度以及角速度
三个方向的加速度计和三轴的陀螺仪
高频(通常100HZ)
累积误差
解决方法:惯性导航系统
点云定位
鲁棒性好,不依赖于 GPS 信息。
依赖于先验地图,地图的准确性和实时性可能会导致定位误差。
需要解决:弱特征环境。比如说在桥上,往前开10米和往后开10米看到的场景都是类似的,对于这类环境来说,如何去找到准确位置,这是必须考虑的问题。
定位系统
多传感器融合定位
综合来说,靠单一传感器定位是不够的,所以采取多传感器融合的方案。基于卡尔曼滤波模型,整体定位效果会有更高的精度和更好的鲁棒性。
卡尔曼滤波模型
卡尔曼滤波是一种高效率的递归滤波器,它能够从一系列的不完全和包含噪声的测量中,估计动态系统的状态。
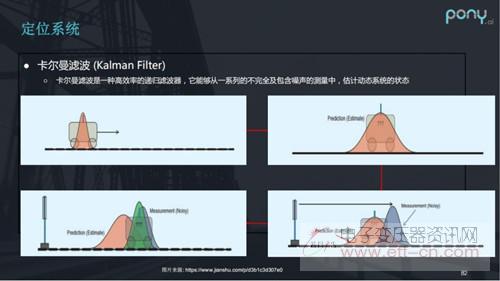
基于卡尔曼滤波模型,我们把自动驾驶车辆当时的位置看作是高斯分布,也就是说,车辆定位在某个区域范围之内,且位于中间的可能性是最大的。
随着车辆行驶,根据运动方程,定位系统能够得到车辆的位置预测。假设一辆车往前行驶了10米,于是车辆产生一个预测位置,然而实际行驶中,预测位置和实际位置的误差逐渐变大。这是因为,此数据可能是由IMU给出,而IMU作为传感器自然会存在误差。同时假设这辆车还装有GPS,那么GPS给出的位置信息便相当于上图中的蓝色的部分,这个定位数据也是包含一定误差的。
于是,我们得到关于这辆车的两个位置信息,将二者结合后便可得到较为准确且可信的结果。由此可见,卡尔曼滤波是不断在更新迭代的,最终实现得到一个比较准确位置的目标。

我认为,定位系统的最终目标是万里无忧,对自动驾驶的挑战则是更低成本和更苛刻的外部环境。最终我们一定会把这些问题解决好,实现这个目标。

(敬请关注微信订阅号:dzbyqzx)