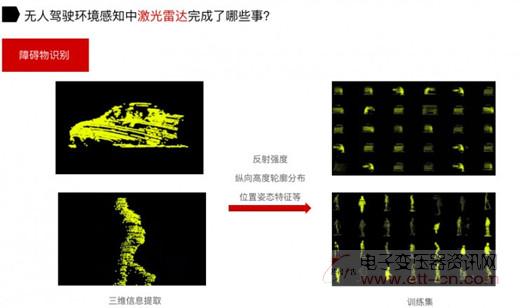
如上图,左上角、左下角是车还是人?对于机器而言,它是不清楚的。右上角和右下角(上图)是我们做的训练集。做训练集是最难的,相当于要提前把不同物体做人工标识,而且这些标识的物体是在不同距离、不同方向上获取到的。
我们对每个物体,可能会把它的反射强度、横向和纵向的宽度以及位置姿态作为它的特征,进行提取,进而做出数据集,用于训练。最终的车辆、行人、自行车等物体的识别是由SVM分类器来完成。我们用这种方法做出来的检测精确度还是不错的。

利用激光雷达进行辅助定位。定位理论有两种:基于已知地图的定位方法以及基于未知地图的定位方法。
基于已知地图定位方法,顾名思义,就是事先获取无人驾驶车的工作环境地图(高精度地图),然后根据高精度地图结合激光雷达及其它传感器通过无人驾驶定位算法获得准确的位置估计。现在大家普遍采用的是基于已知地图的定位方法。

制作高精度地图也是一件非常困难的事情。举个例子,探月车在月球上,原来不知道月球的地图,只能靠机器人在月球上边走边定位,然后感知环境,相当于在过程中既完成了定位又完成了制图,也就是我们在业界所说的 SLAM 技术。
激光雷达是获取高精度地图非常重要的传感器。通过 GPS、IMU 和 Encoder 对汽车做一个初步位置的估计,然后再结合激光雷达和高精度地图,通过无人驾驶定位算法最终得到汽车的位置信息。
(敬请关注微信号:dzbyqzx)