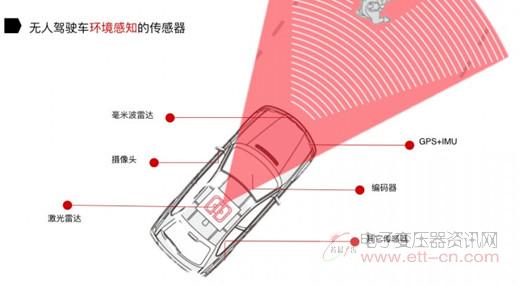
对于环境感知所需要的传感器,我们把它分成三类:
感知周围物体的传感器,包括激光雷达、摄像头和毫米波雷达这三类;
实现无人驾驶汽车定位的传感器,就是 GPS 、IMU 和 Encoder;
其他传感器,指的是感知天气情况及温、湿度的传感器。
今天主要讲的是感知周围物体的传感器,即:激光雷达、毫米波雷达和摄像头。其实他们都有各自的优缺点。

在无人驾驶环境感知中,摄像头完成的工作包括:
车道线检测;
障碍物检测,相当于把障碍物识别以及对障碍物进行分类;
交通标志的识别,比如识别红绿灯和限速牌。
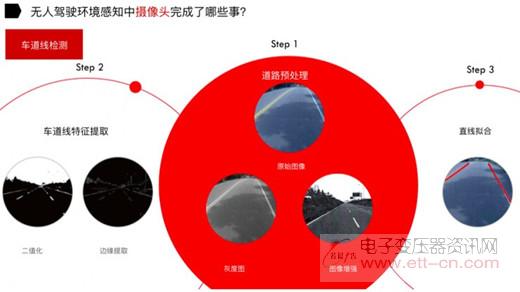
对车道线的检测主要分成三个步骤:
第一步,对获取到的图片预处理,拿到原始图像后,先通过处理变成一张灰度图,然后做图像增强;
第二步,对车道线进行特征提取,首先把经过图像增强后的图片进行二值化( 将图像上的像素点的灰度值设置为 0 或 255,也就是将整个图像呈现出明显的黑白效果),然后做边缘提取;
第三步,直线拟合。
车道线检测难点在于,对于某些车道线模糊或车道线被泥土覆盖的情况、对于黑暗环境或雨雪天气或者在光线不是特别好的情况下,它对摄像头识别和提取都会造成一定的难度。
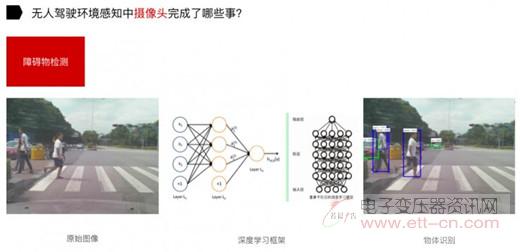
另一个是障碍物检测。上图是我们在十字路口做的实验,获取到原始图像后,通过深度学习框架对物体进行识别。在这当中,做训练集其实是主要的难点。

还有一个是道路标识的识别,这一部分的研究比较多,这里不再赘述。

激光雷达能够完成什么工作?
第一是路沿检测,也包括车道线检测;第二是障碍物识别,对静态物体和动态物体的识别;第三是定位以及地图的创建。
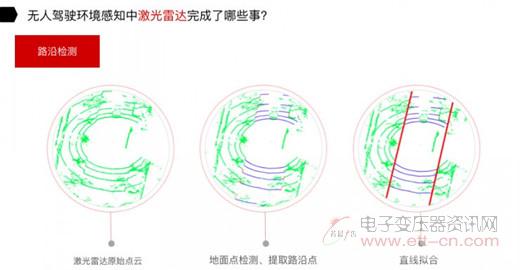
对于路沿检测,分为三个步骤:拿到原始点云,地面点检测、提取路沿点,通过路沿点的直线拟合,可以把路沿检测出来。

接下来是障碍物识别,识别诸如行人、卡车和私家车等以及将路障信息识别出来。
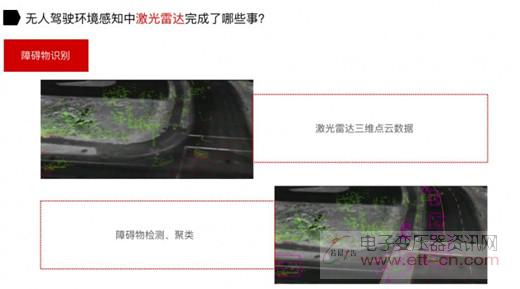
障碍物的识别有这样几步,当激光雷达获取三维点云数据后,我们对障碍物进行一个聚类,如上图紫色包围框,就是识别在道路上的障碍物,它可能是动态也可能是静态的。
最难的部分就是把道路上面的障碍物聚类后,提取三维物体信息。获取到新物体之后,会把这个物体放到训练集里,然后用 SVM 分类器把物体识别出来。