有些负载,如潜水泵等电机引线较长的,可能存在长线效应,即由于变频器输出的谐波成分较大,到电机端电压可能增大,因此调节时要注意观察电机电流的变化,当发现电机电流有持续增大的情况时,应及时停机,这时应考虑加装输出电抗器。
(3)起动试验。将给定信号加至最大,观察:
起动电流的变化;
整个拖动系统在升速系统中,运行是否平稳。
如因起动电流过大而跳闸,则应适当延长升速时间。如在某一速度段起动电流偏大,则设法通过改变起动方式(s形、半s形等)来解决。
(4)停机试验。将运行频率调至最高工作频率,按停止键,观察拖动系统的停机过程。
停机过程中是否出现因过电压或过电流而跳闸,如有。则应适当延长降速时间。
当输出频率为0hz时,拖动系统是否有爬行现象,如有,则应适当加入直流制动。
(5)拖动系统的负载试验
负载试验的主要内容有:
如fmax》fn,则应进行最高频率时的带载能力试验。也就是在正常负载下能否带得动。
在负载的最低工作频率下,应考察电机的发热情况。使拖动系统工作在负载所要求的最低转速下,施加该转速下的最大负载,按负载所要求的连续运行时间进行低速运行试验,观察电机的发热情况。
过载试验可按负载可能出现的过载情况及持续时间进行试验,观察拖动系统能否继续工作。
调整完后,变频器正式负载运行,一般应观察两小时以上,保证可靠工作。
以上这些是变频器调试的最基本的步骤。在变频器调试过程中,还可能遇到各种各样的情况。如变频器的干扰和抗干扰,功率因数的补偿,闭环的运行等,都要通过具体的实践来逐步掌握。
4.2.3 闭环运行
这里再谈谈闭环运行。它是变频器的最主要的一个功能。许多场合只有通过闭环运行才能体现出自动控制的优点。
(1)闭环系统的原理
闭环运行就是选取拖动系统的某一个物理量(如温度、压力、张力、液位等),在某一点(该点对整个系统的运行应具有关键作用或带有普遍性)用相应的传感器或变送器(如热电偶、远传式压力表、温度变送器、压力变送器、张力传感器等)检测后送到pid调节仪上,与系统的期望值(可在pid上设定)进行比例、积分、微分的运算处理,然后送到变频器的频率输入端子,来调节变频器的频率,进而调节电机的转速,使整个拖动系统处于自动调节、稳定运行的状态。
系统的检测值称为反馈信号,期望值称为给定信号,或目标信号,系统的调节过程就是这两个信号反复地比较、运算,使其尽量接近的过程。这里以恒压供水为例介绍一下。如下图13所示。
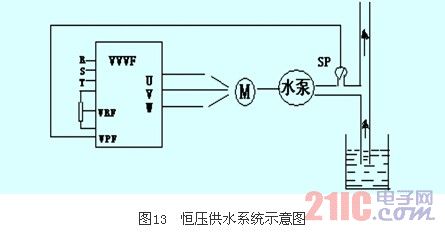
图中水泵电机由变频器vvvf供电。sp是压力传感器,检测管道上的压力,也可以用压力变送器,远传式压力表等,由变频器供给其电源+24v或+5v。它检测到管道压力后变换成4—20ma电流或0—5v的电压信号反送给变频器。
将变频器设定为pid有效后,变频器有两个模拟信号输入端子:
目标信号输入端。即给定端vrf。是一个与压力的控制目标相对应的值。有变频器上的电位器进行设定。也可以由键盘直接给定。当采用专用的pid控制仪时,由专用的sv设定窗口设定。它除了和所要求的压力的控制目标有关外,还与压力变送器sp的量程有关,设定时要与相关的量程相当。
反馈信号输入端。即辅助给定端vpf。它接受从压力传感器sp反馈回来的信号。
(2)控制的过程
设:xt为目标信号,其大小与所要求的管道压力相对应。xf为压力变送器的反馈信号。则变频器输出频率fx的大小有合成信号(xt—xf)决定。
如管道压力p超过了目标值,则xf》xt→(xt—xf)《0→变频器的输出频率fx↓→电动机转速nx↓→管道压力p↓→直至与所要求的目标压力相符(xt≈xf)为止。
反之,如管道压力p低于目标值,则xf《xt→(xt—xf)》0→变频器的输出频率fx↑→电动机转速nx↑→管道压力p↑→直至与所要求的目标压力相符(xt≈xf)为止。
上述过程存在着一个矛盾:一方面,我们要求管道的实际压力(其大小与xf成正比)应无限接近于目标压力(其大小与xt成正比),就是说,要求(xt—xf)→0;另一方面,变频器的输出频率fx又是由xt和xf相减的结果来决定的,可以想象,如果把(xt—xf)直接作为给定信号xg的话,系统将是无法工作的。